
DESCRIPTION
This Mecanum wheel is being created for everyone who want to make a Omnidirectional mobile platform by themselves.
You don't have to buy any expensive parts, you just need to buy a tittle cheap parts and the other parts can be print by your 3d printer.
You don't have to buy any expensive parts, you just need to buy a tittle cheap parts and the other parts can be print by your 3d printer.
DETAILS
Matters needing attention:
As we all know, Mecanum Wheel has the opposite one and the positive one. A Omnidirectional mobile platform can consists of four Mecanum Wheel(two opposite wheel and two positive wheel )
So you can find two STL files one of them called "p0" and the other one called "p0-m".
To build a opposite wheel, you should print two "p0", one "p1" and nine "p2".
To build a positive wheel, you should print two "p0-m", one "p1" and nine "p2".
PROJECT LOGS
Print the parts
05/08/2019 at 17:33
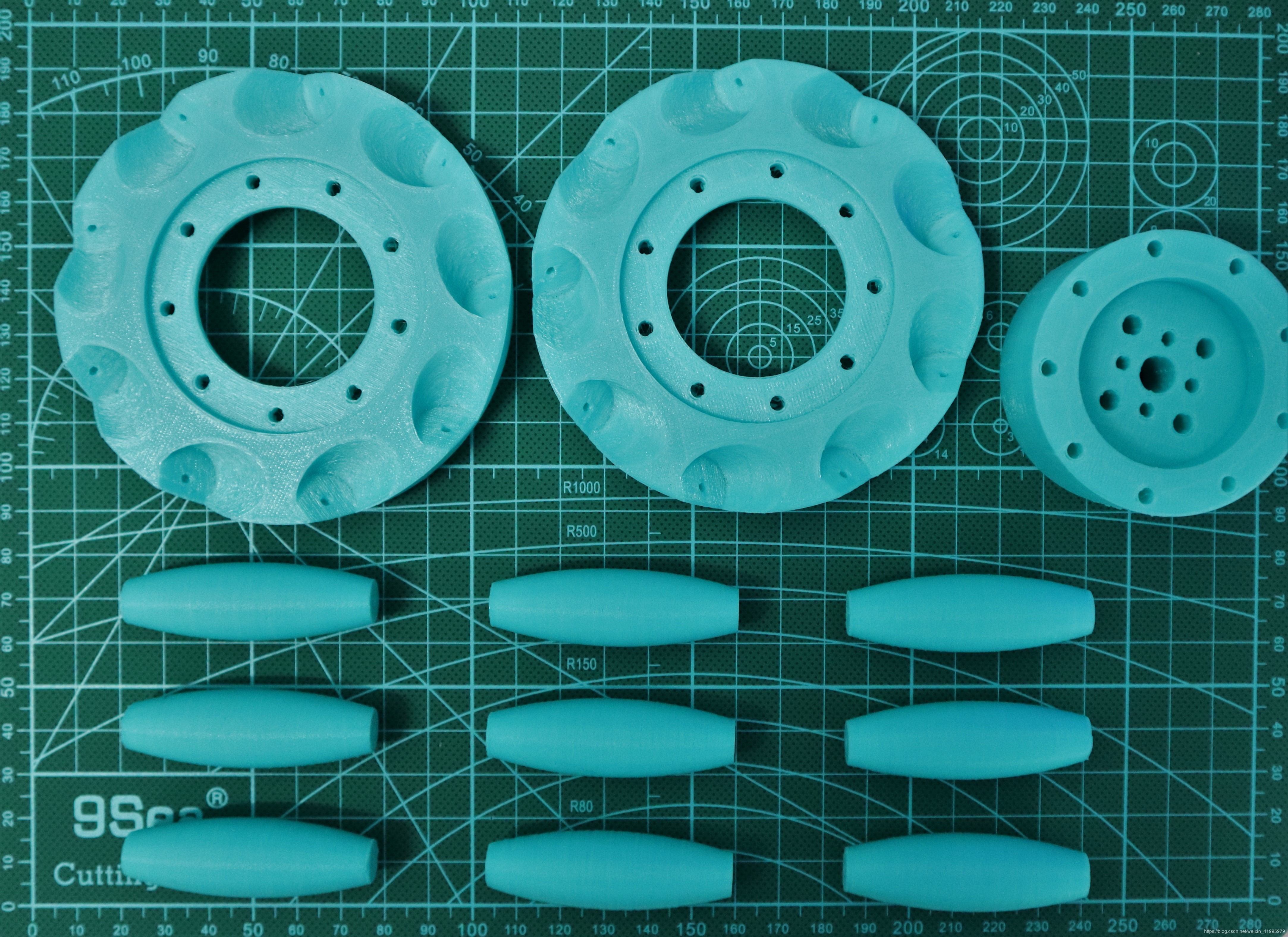
All parts of a wheel are shown in the figure below.
If you are going build a mobile platform, you should print four Mecanum Wheels. It cost me about five days to print 36 "p2", 4 "p0", 4 "p0-m", 4 "p1".
Right, that's a long time!
BUILD INSTRUCTIONS
Printing all the partsDownload all the STL files, then import them to your slicing software.By the way, the slicing software I used is Cura 15.04.Transform the STL files into Gcode files, then you can use them to print all the parts.As what I had said in the log, that will cost you a lot of time. So, enjoy it!
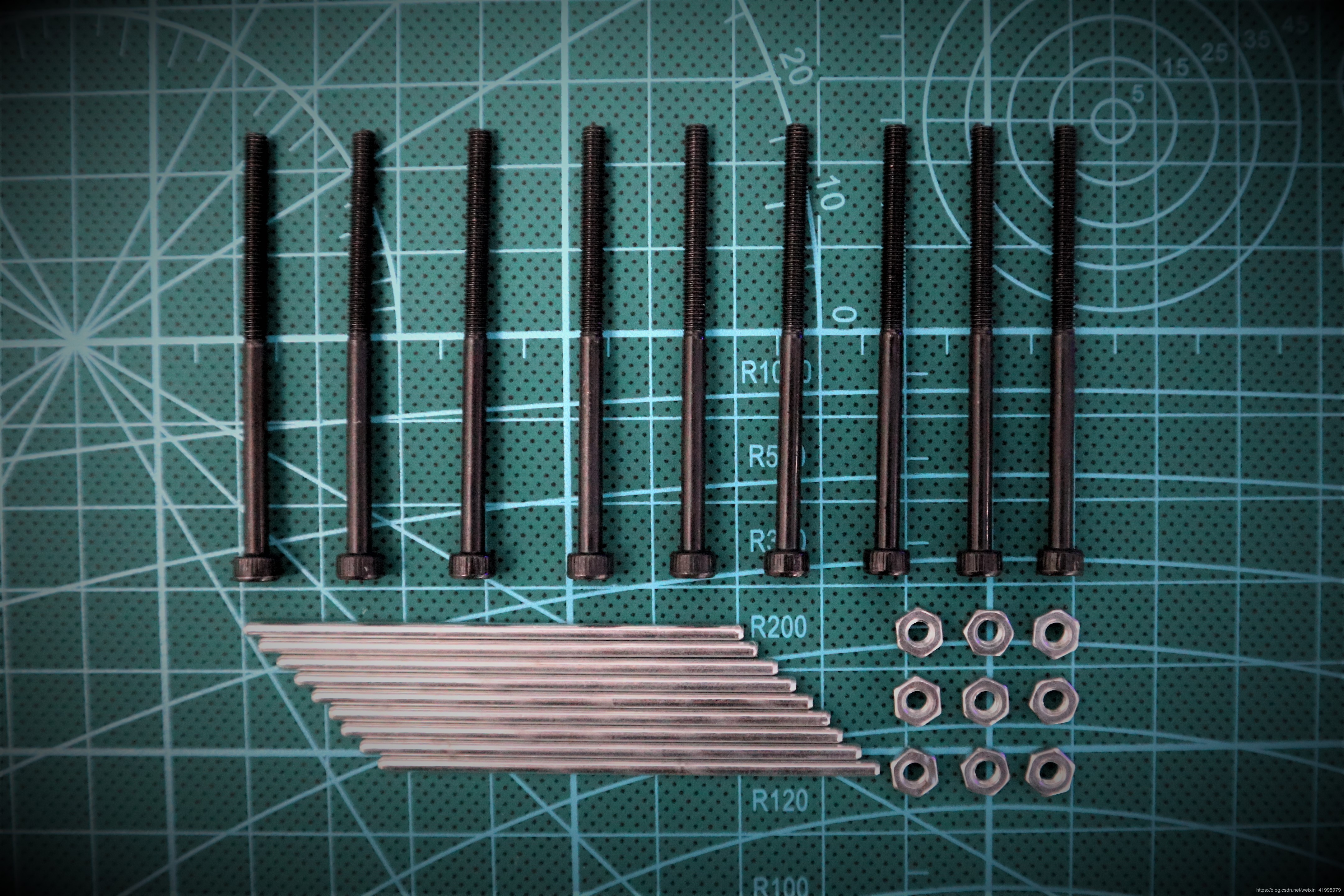
Prepare other necessary partsYou still need some necessary parts except the 3d printing parts. Please refer to Components.The other necessary parts you need to assemble a Mecanum Wheel are shown in the figure below.
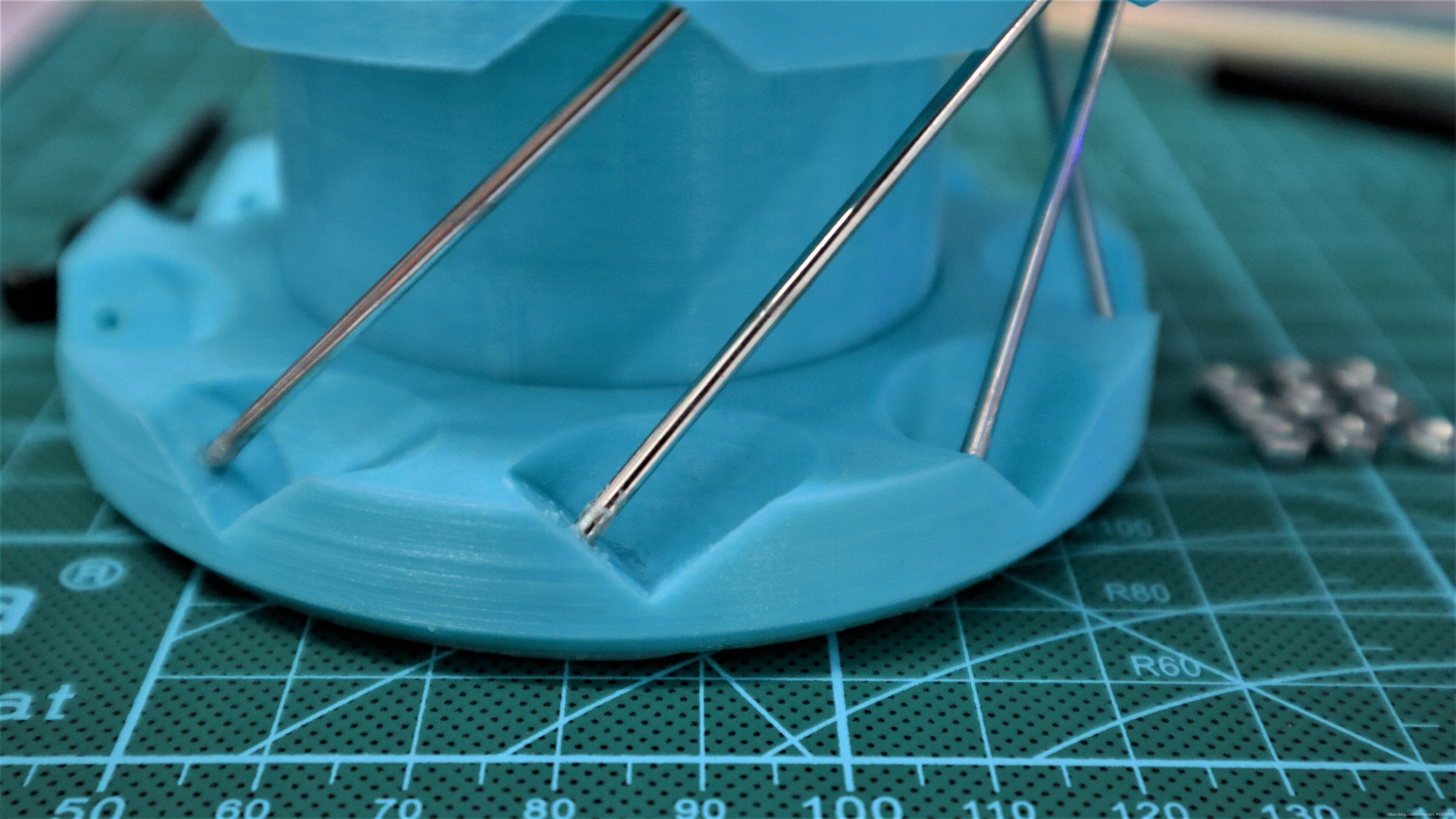
Fix one of the end of the iron shaft with 502 glue firstThis step is a great test of skill.As shown below, you should fix the iron axis one by one. Take it easy!
Assemble the rolls and tighten the screw and nutThe silica gel heat shrinkable tube is sleeved outside the roll, and then the roll is assembled on the iron axle.Then tighten the screws and nuts from both sides of the wheel.
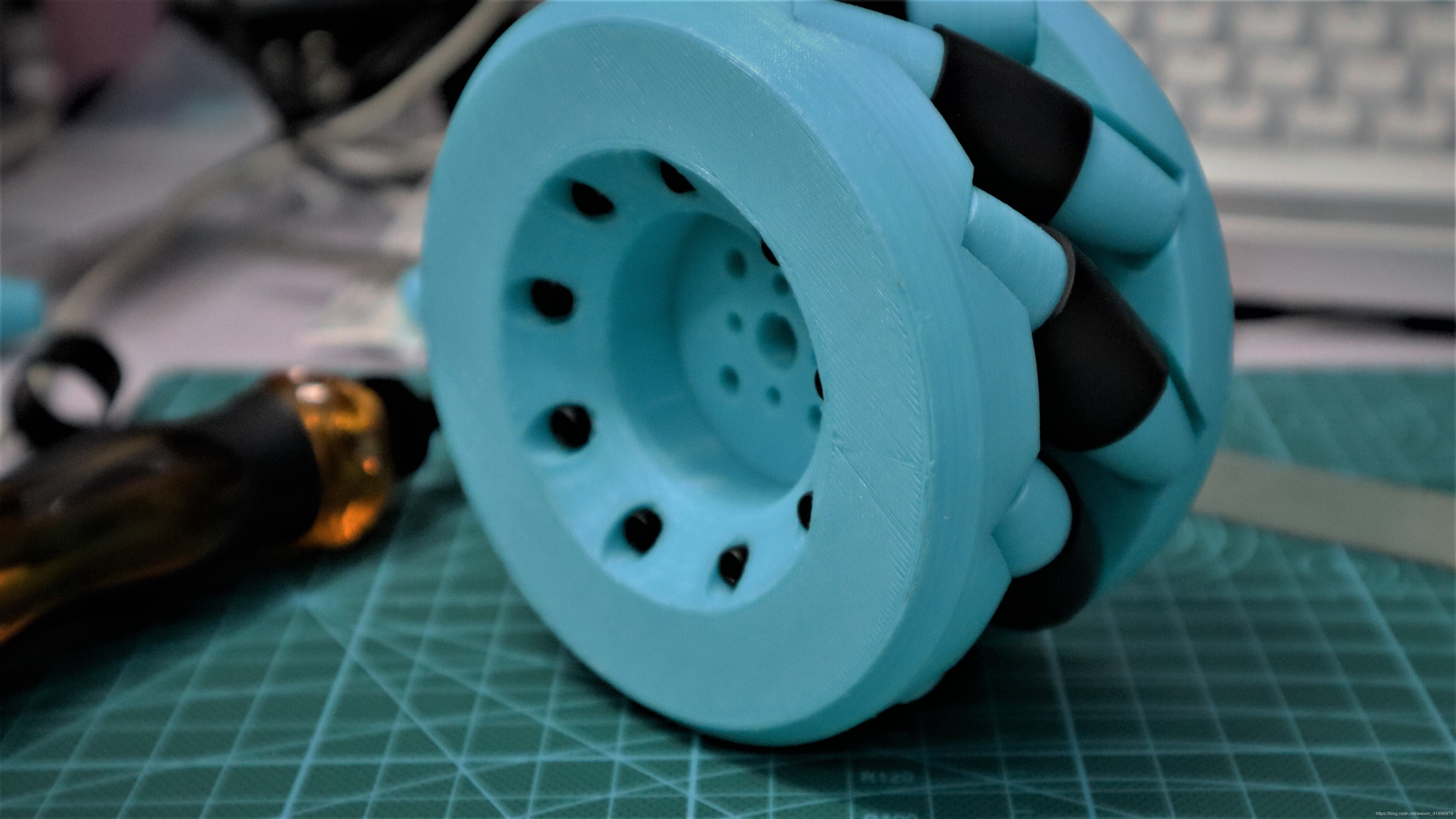
Done!
Do the same thing to assemble the other three wheels.
Comments
Post a Comment